
什麼是3D感測?
什麼是3D感測?
關鍵字 #飛時測距 #立體視覺 #結構光 #3D Camera
傳統2D平面的影像辨識雖然透過RGB彩色相機即可擷取分析,但也易受到拍攝角度與環境照明等條件干擾;在此情況下,3D感測相較2D多了個深度偵測,從平面的X、Y軸增加為X、Y、Z的三軸座標,可擷取目標物的深度圖像,並獲取空間的立體資訊,不僅提高辨識的精準度,應用也更加廣泛。 目前3D CARMERA三大主流運用分為: 飛時測距、立體視覺、結構光,以下為條列簡介:
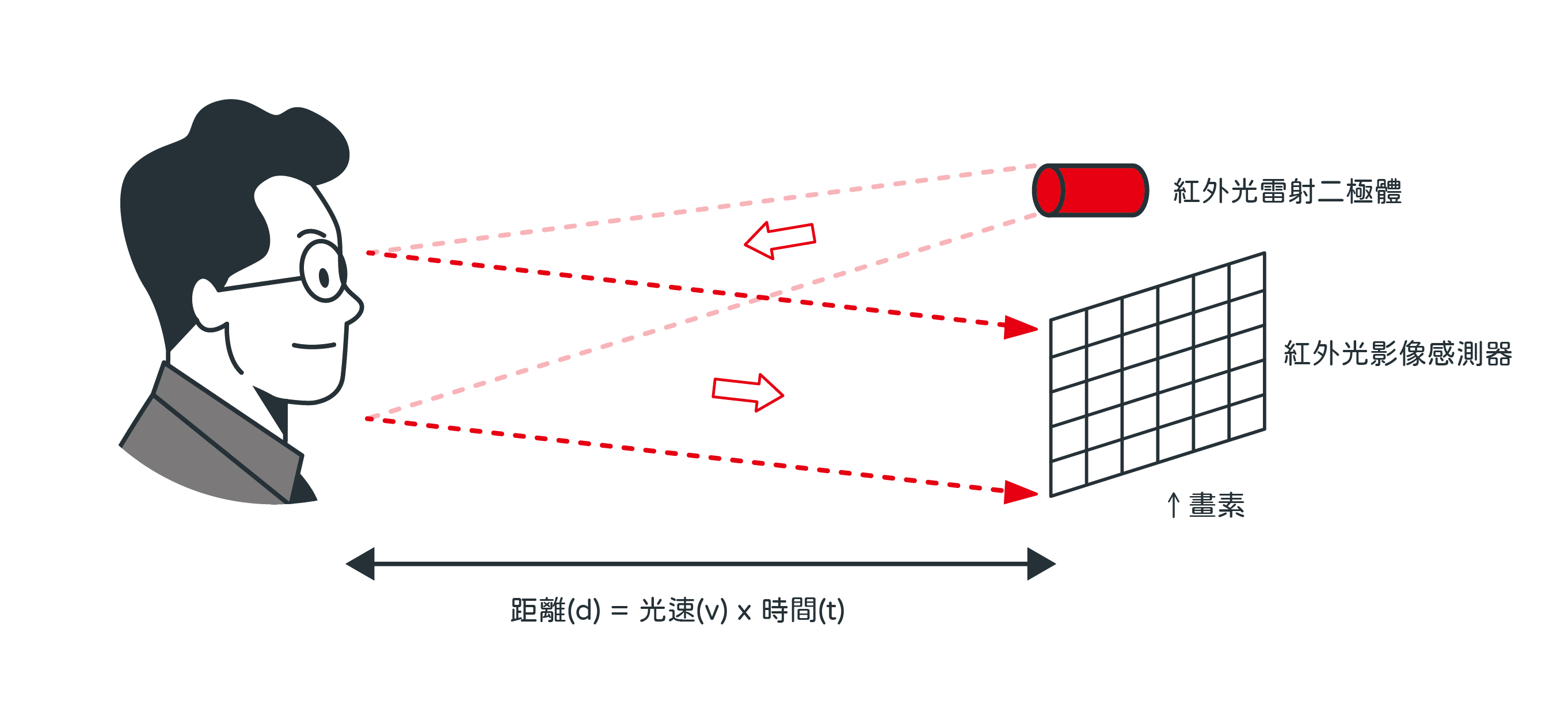
飛時測距 (ToF:Time of Flight )
飛時測距 (ToF:Time of Flight):利用發光二極體(LED:Light Emitting Diode)或 雷射二極體 (LD:Laser Diode)發射出紅外光,照射到物體表面反射回來,由於光速(v)已知,可以利用一個紅外光 影像感測器 量測物體不同深度的位置反射回來的時間(t),利用簡單的數學公式就可以計算出物體不同位置的距離(深度)。
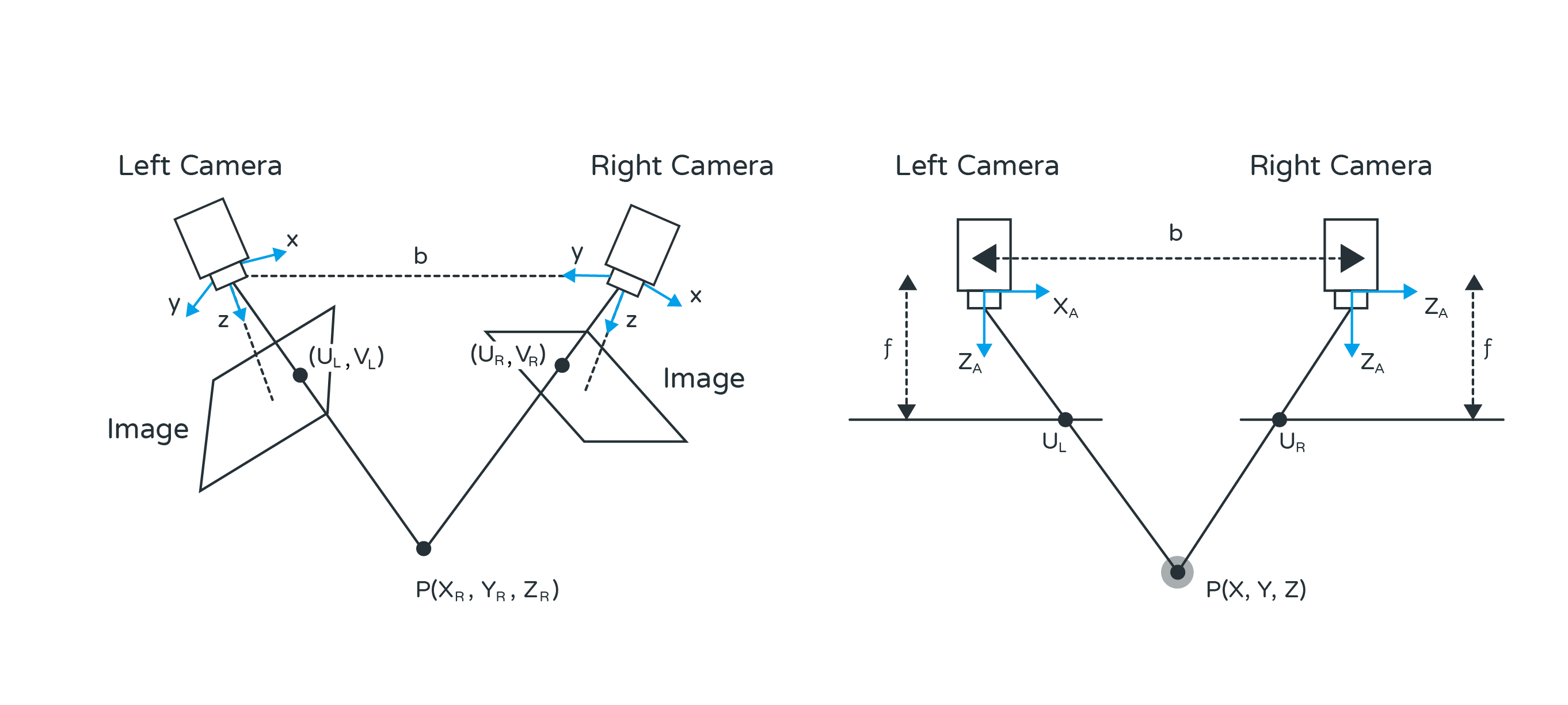
立體視覺 ( Stereo Vision )
立體視覺 ( Stereo Vision ):由於和人類觀看的方式相似,最容易理解的3D方法是立體視覺。這是一種三角測量法,即用相隔一定距離的攝影鏡頭去獲得兩個(或多個)影像(或用一個攝影鏡頭在影像之間移動),然後透過比較來確定攝影鏡頭視場中物體的距離。將攝影鏡頭分離會產生視差,這樣,較近物體相對遠處背景的對齊就會不同——物體越接近攝影鏡頭,視差越大。
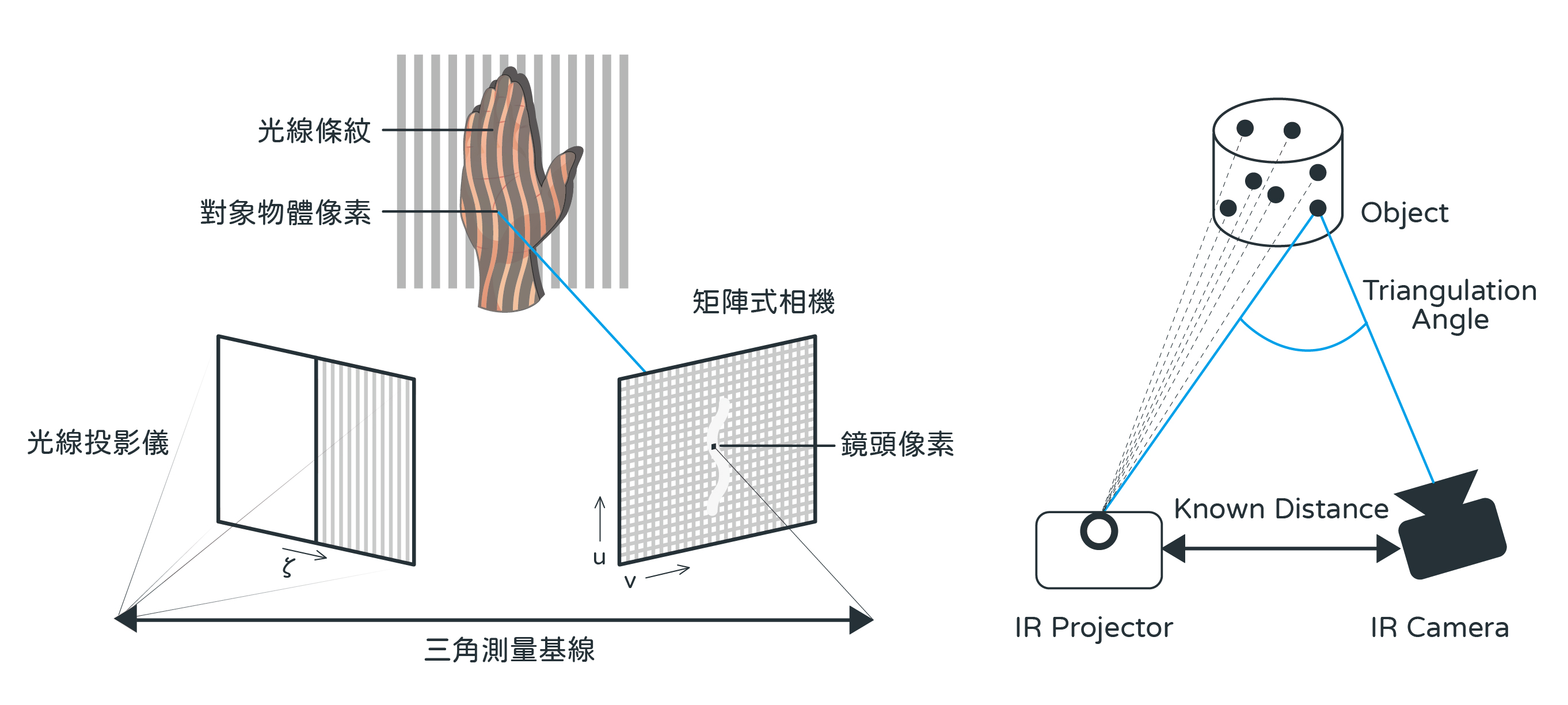
結構光 ( Structured Light )
結構光 (Structured light):利用雷射二極體(LD:Laser Diode)或數位光源處理器(DLP:Digital Light Processor)打出不同的光線圖形,經由物體不同深度的位置反射回來會造成光線圖形扭曲,例如:打出直線條紋的光線到手指上,由於手指是立體圓弧形造成反射回來變成圓弧形條紋,進入紅外光影像感測器後就可以利用圓弧形條紋反推手指的立體結構。
傳統2D平面的影像辨識雖然透過RGB彩色相機即可擷取分析,但也易受到拍攝角度與環境照明等條件干擾;在此情況下,3D感測相較2D多了個深度偵測,從平面的X、Y軸增加為X、Y、Z的三軸座標,可擷取目標物的深度圖像,並獲取空間的立體資訊,不僅提高辨識的精準度,應用也更加廣泛。 目前3D CARMERA三大主流運用分為: 飛時測距、立體視覺、結構光,以下為條列簡介:
飛時測距 (ToF:Time of Flight )
飛時測距 (ToF:Time of Flight):利用發光二極體(LED:Light Emitting Diode)或 雷射二極體 (LD:Laser Diode)發射出紅外光,照射到物體表面反射回來,由於光速(v)已知,可以利用一個紅外光 影像感測器 量測物體不同深度的位置反射回來的時間(t),利用簡單的數學公式就可以計算出物體不同位置的距離(深度)。
立體視覺 ( Stereo Vision )
立體視覺 ( Stereo Vision ):由於和人類觀看的方式相似,最容易理解的3D方法是立體視覺。這是一種三角測量法,即用相隔一定距離的攝影鏡頭去獲得兩個(或多個)影像(或用一個攝影鏡頭在影像之間移動),然後透過比較來確定攝影鏡頭視場中物體的距離。將攝影鏡頭分離會產生視差,這樣,較近物體相對遠處背景的對齊就會不同——物體越接近攝影鏡頭,視差越大。
結構光 ( Structured Light )
結構光 (Structured light):利用雷射二極體(LD:Laser Diode)或數位光源處理器(DLP:Digital Light Processor)打出不同的光線圖形,經由物體不同深度的位置反射回來會造成光線圖形扭曲,例如:打出直線條紋的光線到手指上,由於手指是立體圓弧形造成反射回來變成圓弧形條紋,進入紅外光影像感測器後就可以利用圓弧形條紋反推手指的立體結構。